
www.modernitovarna.com
13
'23
Written on Modified on
Díky technologiím Siemens může robot na sklizeň jahod trénovat ve virtuálním prostoru
Na rodinné farmě Ráječek u Brna na letošní úrodě jahod testují novou generaci robotů FRAVEBOT. Roboty jsou vybaveny řídicím systémem SIMATIC S7-1500 a dalšími technologiemi Siemens a mají za úkol sklízet zralé jahody a monitorovat zdravotní stav rostlin a plodů.
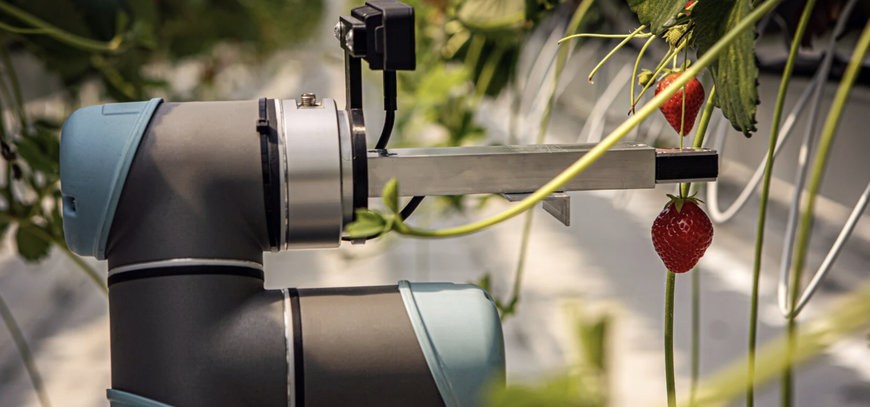
Budoucím trendem zemědělství je udržitelné pěstování plodin s méně zdroji a bez použití chemických přípravků. Aby zemědělci mohli vyhovět těmto novým nárokům a požadavkům, musejí úzce spolupracovat s průmyslem, který jim dokáže poskytnout potřebné nástroje. FRAVEBOT (Fruit and Vegetable Robot), který monitoruje a sklízí jahody, je výsledkem spolupráce společností Fravebot (dříve Optisolutions), Siemens, rodinné farmy Ráječek a řady odborníků na pěstování ovoce a zeleniny.
Ve sklenících farmy Ráječek se prohánějí hned dva FRAVEBOTy: FRAVEBOT Scout monitoruje zdraví jahodníků a plodů a samozřejmě také jejich zralost, zatímco FRAVEBOT Harvestor pomáhá se sklizní. „Rozdělení pracovních činností mezi dva typy robotů je výhodné v mnoha směrech,“ vysvětluje Vratislav Beneš, šéfkonstruktér společnosti Fravebot. „Scouti, jejichž primárním úkolem je monitorování rostlin, se pohybují po skleníku rychleji, a kdyby měly současně vykonávat i nějakou práci, zdržovalo by je to. Naopak, pracovní roboti fungují efektivně v případě, kdy vyjíždějí pouze tam, kde jsou potřeba,“ dodává.
FRAVEBOT jako součást ekosystému Siemens Xcelerator
Siemens pro projekty FRAVEBOT zajišťuje rozhraní s fyzickým světem. „Vizí společnosti Siemens je stát se dodavatelem řešení a současně propojovat různé dodavatele technologických řešení tak, abychom dokázali uspokojit potřeby koncového zákazníka,“ vysvětluje Tomáš Froněk, vedoucí oddělení průmyslové automatizace českého Siemensu. „V tomto konkrétním případě zákazník z oboru zemědělství, který potřebuje pomoct se sklizní anebo s monitoringem rostlin, najde na platformě Siemens Xcelerator už konkrétní řešení: technologie Siemens ve spolupráci s výrobcem grafických čipů Nvidia a software od společnosti Fravebot, která je jedním z partnerů Siemens na této platformě. Zákazníkovi je tak k dispozici kompletní řešení, které potřebuje, aniž by musel poptávat více různých dodavatelů. Na jedno kliknutí získá funkční řešení se zárukou, že bude fungovat, navíc doložené i konkrétní referencí,“ doplňuje Tomáš Froněk.
Robot trénuje ve virtuálním prostoru
Zcela unikátním rysem řešení od Fravebotu je trénování robota v prostředí digitálního dvojčete. To zatím neumí žádný ze zahraničních konkurenčních projektů a je to přístup, který vzbuzuje velký ohlas i v akademických kruzích zabývajících se výzkumem aplikací moderních technologií v zemědělství.
Tým vývojářů ze společnosti Fravebot umí generovat tzv. syntetická data a v omniversu, které běží na Nvidia grafických kartách, nasimulovat jednotlivé řádky jahod. Díky tomu, že simulační nástroje dnes umí simulovat i fyzikální zákony (například tíhu jahod), je možné dopředu natrénovat neuronové sítě robotu bez toho, že by se musel pohybovat v reálném prostředí. Tím se výrazně urychlí proces vývoje robotu a současně se i ušetří náklady, poněvadž učení robotu v reálném prostředí je vždy drahé. Trénink neuronové sítě pro konkrétní projekt a konkrétního zákazníka navíc může začít ještě dříve, než se robot fyzicky postaví. „Toto je podle mě ta hlavní cesta: nezaměřit se pouze na robotickou část, ale i na analytiku a uživatelské rozhraní pro pěstitele,“ zdůrazňuje Matěj Sklenář z rodiny Sklenářových, majitelů farmy Ráječek.
Druhá generace FRAVEBOTů je vybavena novými technologiemi Siemens. FRAVEBOT je postaven na vyšší verzi řídicího systému SIMATIC S7-1500 (předchozí verze využívala SIMATIC S7-1200) doplněného o modul TM NPU (neural processor unit). Pro zajištění běhu neuronových sítí je modul S7-1500 TM NPU vybaven TensorBoxem 520A – průmyslovým PC s integrovaným čipem založeným na technologii Nvidia Xavier Nx.
Jahodový robot obsahuje i několik úplných novinek z portfolia Siemens. Především jde o 5G router Scalance MUM856-1, který umožňuje například reálný přenos videa snímaného kamerou do centrálního řídicího systému. Spolu s wifi 6, která je nabízena v totožném formátu, navíc dovoluje rychlou komunikaci a vzdálenou správu pomocí SINEMA Remote Connect – klienta pro centrální správu všech VPN připojení.
Další novinkou je RobotLibrary – technologická knihovna umožňující programování a řízení robotu jen za využití TIA Portalu a interpreteru na straně robotu, čímž odpadá nutnost dvou programovacích prostředí. „Toto řešení výrazně usnadňuje programovací proces a současně nabízí i jistou modulárnost. Jakmile si zákazník připraví program, tak už je teoreticky jedno, jaký robot a od kterého výrobce chce ovládat. Počet výrobců, jejichž roboty řešení podporuje, postupně narůstá,“ vysvětluje Tomáš Froněk.
Využití robotických farmářů je velmi široké
Kromě jahod a rajčat lze všechny varianty robotického farmáře FRAVEBOT využít pro pěstování a sklizeň řady dalších plodin. Jediným omezením je nutná existence skleníkové infrastruktury, tzn. kolejí, po kterých se robot pohybuje, a dobré je mít i kvalitní nástroje na monitorování prostředí ve skleníku, protože sledování vzájemné vazby mezi patogenem s prostředím, ve kterém se rostliny nalézají, přináší mnoho velmi cenných informací. Vedle ovoce a zeleniny mohou v budoucnosti využívat FRAVEBOTy i pěstitelé okrasných rostlin, především květin, u nichž velmi záleží na vzhledu a neporušenosti.
Předprodukční modely FRAVEBOTů se chystají do výroby
Všechny modely zemědělských robotů od společnosti Fravebot, nástupnické firmy společnosti OptiSolutions, které jsou nasazeny na farmě Ráječek, jsou již v předprodukční fázi vývoje. A brzy se již začnou vyrábět verze produkční. Počítá se s prodejem hlavně do zahraničí do skleníkových velmocí, jako je Nizozemsko, Kalifornie nebo Španělsko.
www.siemenspress.com
